
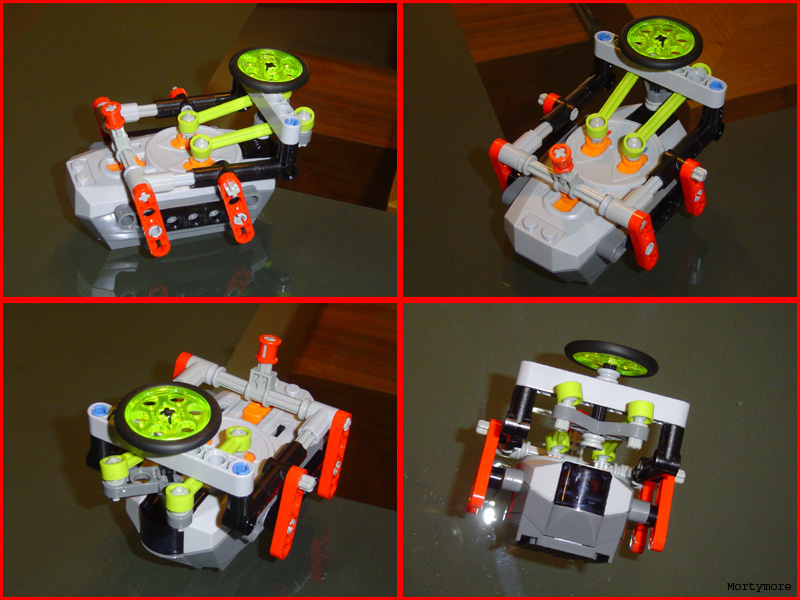
Na imagem seguinte está um comando PF modificado de forma a controlar um tradicional carro. A roda do lado direito no comando é responsável por controlar a direcção, o stick do lado esquerdo fará andar o veículo para trás e para frente, ou se não actuado, manter-se-á parado.

Acontece que no caso de um carro, e de acordo com o comando anteriormente apresentado, este terá um motor para tracção, e outro para direcção. No caso de um veículo com lagartas, só temos motores para tracção, sendo que a direcção é conseguida á custa de variantes na tracção conferida a cada uma das lagartas, da seguinte forma:
Esq.............Dir...........Movimento
stop..........stop..........não move
frente.......stop..........vira direita (p.frente)
stop.........frente........vira esquerda (p.frente)
frente.......frente........avança
frente........trás..........gira direita
trás..........frente........gira esquerda
trás..........stop..........vira esquerda (p.trás)
stop.........trás...........vira direita (p.trás)
trás..........trás..........recua
Portanto as modificações a realizar no comando para conseguir o que pretendia não são tão directas como o caso do carro.
O resultado é este:

Pasta brickshelf: http://www.brickshelf.com/cgi-bin/gallery.cgi?f=406853
Video no youtube: http://www.youtube.com/watch?v=HZNXWf6gMsY
Para fazer o veículo mover-se para a frente ou para trás, actua-se sobre o ponto vermelho que está situado por cima do selector de canal do comando, empurrando-o para a frente, ou puxando-o para trás, o que fará mover os 2 controlos do comando em simultâneo no mesmo sentido. Naturalmente a direcção é conseguida rodando a roda. Se apenas esta for actuada, o veículo gira sobre si mesmo, tal como aconteceria no caso dos sticks, se fossem movidos em direcções opostas. Por exemplo, movendo o ponto vermelho para a frente e rodando a roda para a direita, o veículo anda em frente virando para o lado direito, o que traduzido em movimentos de lagartas, fica parada a do lado direito e move-se para a frente a do lado esquerdo. Todo o resto são variantes disto.
O comando não é perfeito, pois é necessário dar-lhe uma certa liberdade de movimento quando pretendemos por exemplo andar para frente e virar, pois ao rodar o volante não podemos estar a empurrar firmemente para a frente o ponto vermelho, porque toda a estrutura ao rodar o volante vai "querer" deslocar-se ligeiramente para trás.
Ainda assim considero que está perfeitamente utilizável, mas fica a ideia pois podem surgir alternativas mais bem concebidas ou construídas, já que o que fiz foi limitado ás poucas peças de que disponho.
As imagens no osciloscópio que aparecem no vídeo são os sinais reais transmitidos pelo comando PF, e que coloquei em background em cada uma das imagens no início do video que apresentam cada um dos movimentos.
Espero que isto seja de alguma utilidade, e todos os comentários e propostas são bem-vindos.
Abraço
PS: Este tipo de comando também poderá ser útil para carros que tenham 2 rodas motorizadas directamente, daquele tipo de carros que depois normalmente leva uma 3ª roda que gira livremente (roda louca).





