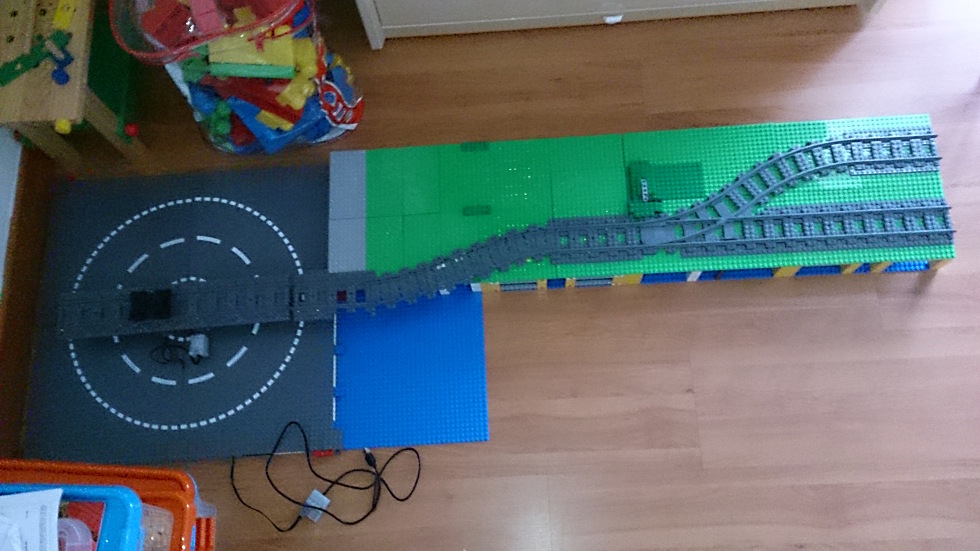
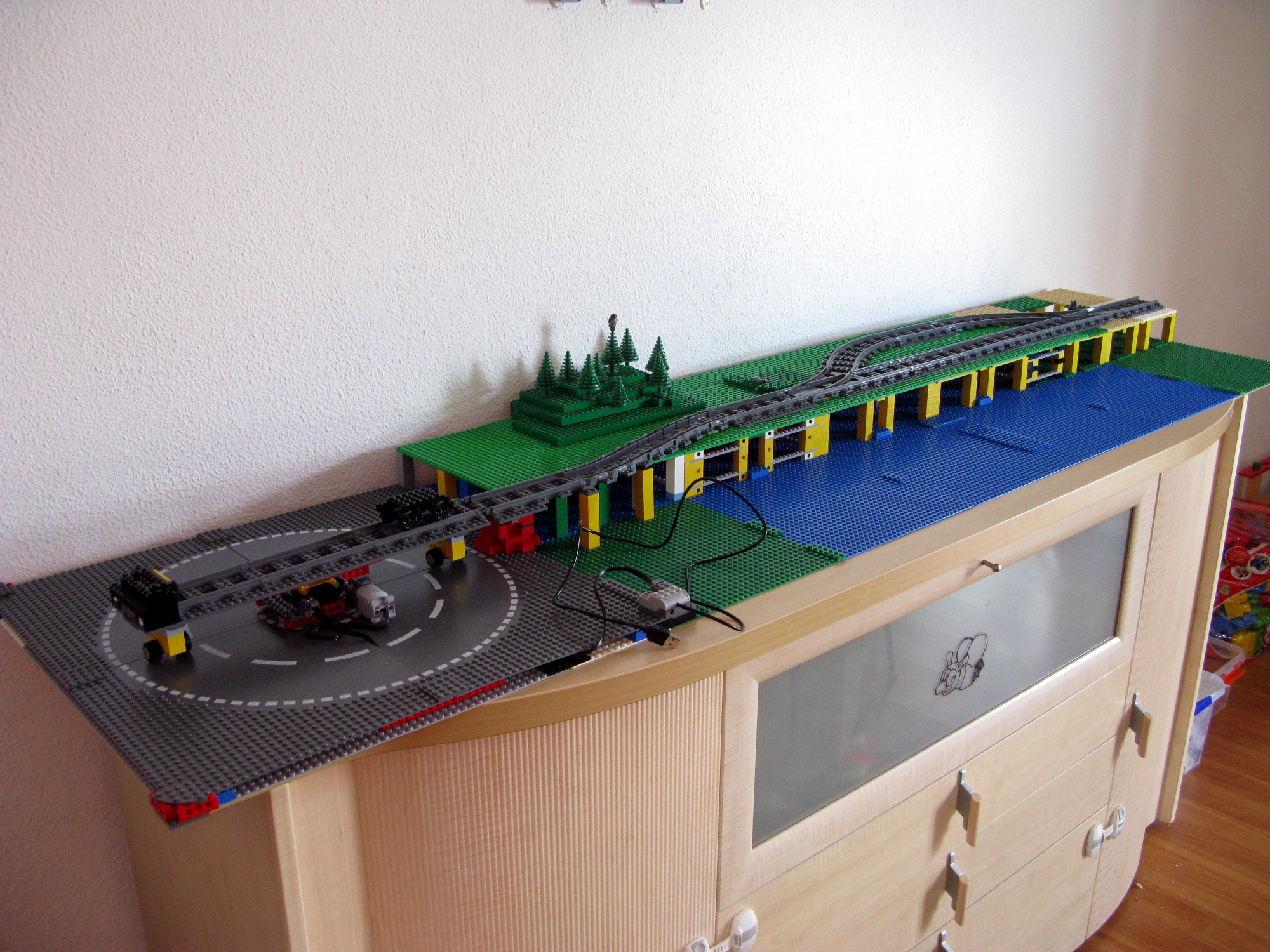
Ponto de situação:

Vou acrescentar mais duas baseplates 32x32 à direita, com outra agulha motorizada de modo a ficarem as 2 linhas para a esquerda e apenas uma linha para a direita.
Em dimensões MFL fica o equivalente a 2 módulos.
Na parte do controlo a ideia é:
- 2 sensores na plataforma giratória para saber quando está em 0º e quando está em 180º
- colocar algures um sensor RFID para identificar os combóios que passam por cima - neste momento estou a considerar na própria plataforma para saber que comboio (locomotiva) está por cima
- ligar os 2 motores PF-M das agulhas, o motor PF-L da plataforma giratória, os 2 sensores da plataforma e o sensor RFID a um Mindstorms EV3 e escondê-lo nos subterrâneos, com ligação WiFi
- desenvolver um painel de controlo para a partir de um PC ou Tablet visualizar a posição da plataforma e a identidade do combóio e permitindo mudar a orientação das agulhas e da plataforma








{kind=link}